Guidewire Tip Tracking using U-Net with Shape and Motion Constraints
Published in 2019 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), 2019
Recommended citation: Ihsan Ullah et al. (2019). Guidewire Tip Tracking using U-Net with Shape and Motion Constraints; 2019 International Conference on Artificial Intelligence in Information and Communication (ICAIIC). 1(1). https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8669088
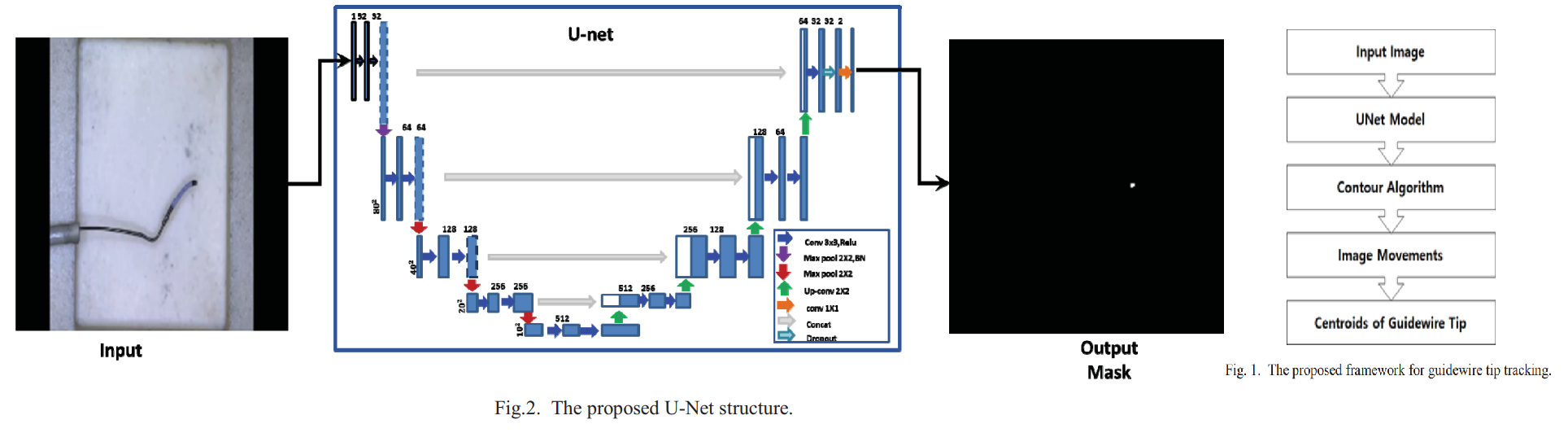
In recent years, research has been carried out using a micro-robot catheter instead of classic cardiac surgery performed using a catheter. To accurately control the micro-robot catheter, accurate and decisive tracking of the guidewire tip is required. In this paper, we propose a method based on the deep convolutional neural network (CNN) to track the guidewire tip. To extract a very small tip region from a large image in video sequences, we first segment small tip candidates using a segmentation CNN architecture, and then extract the best candidate using shape and motion constraints. The segmentation-based tracking strategy makes the tracking process robust and sturdy. The tracking of the guidewire tip in video sequences is performed fully-automated in real-time, i.e., 71 ms per image. For two-fold cross-validation, the proposed method achieves the average Dice score of 88.07% and IoU score of 85.07%.
#Proposed Framework and Examples #